Músculos artificiais dão vida a robôs: inovação em eficiência e adaptabilidade
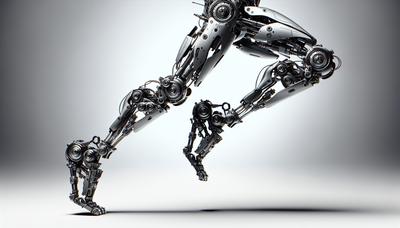
São PauloPesquisadores da ETH Zurich e do Instituto Max Planck para Sistemas Inteligentes desenvolveram um novo tipo de perna robótica que utiliza músculos artificiais. Em vez de motores elétricos, como na maioria dos robôs, essas pernas usam dispositivos eletro-hidráulicos chamados HASELs. Essa inovação permite que as pernas robóticas se movam com mais eficiência e se ajustem melhor a diferentes situações.
Este novo avanço é relevante porque representa uma mudança significativa.
- Maior eficiência energética
- Melhor adaptação a diferentes tipos de terreno
- Capacidade de realizar saltos altos e movimentos rápidos
- Necessidade de menos sensores complexos
Músculos Artificiais Usam Eletricidade Estática
Músculos artificiais funcionam utilizando eletricidade estática. Esses dispositivos são sacos plásticos preenchidos com óleo que possuem eletrodos que reagem a mudanças de voltagem. Quando a voltagem é aplicada, os eletrodos se aproximam, empurrando o óleo para um lado e encurtando o saco. Este processo gera movimentos semelhantes aos dos músculos reais.
Uma das vantagens sobre os motores elétricos é a eficiência energética. Motores elétricos frequentemente transformam energia extra em calor, necessitando de sistemas de refrigeração para controlar essa dissipação térmica. Este sistema de músculos artificiais, por ser eletrostático, não apresenta esse problema. Portanto, não precisa de dissipadores de calor ou ventiladores, tornando-o mais eficiente.

A perna robótica consegue saltar, demonstrando sua alta adaptabilidade e agilidade, facilitando a caminhada em terrenos irregulares. O sistema de músculos artificiais ajusta-se automaticamente ao ambiente, utilizando apenas dois sinais para dobrar e estender. Não precisa de muitos sensores para monitorar a posição da perna.
Campo de Atuadores Eletro-Hidráulicos: Um Novo Horizonte de Inovação
O campo dos atuadores eletro-hidráulicos ainda é muito recente, tendo começado há cerca de seis anos. O rápido progresso em controles e aprendizado de máquina mostra a necessidade de novos hardwares. Músculos artificiais parecem promissores para usos específicos, como preensores que precisam adaptar seus movimentos com base no objeto. No entanto, esses atuadores ainda não são úteis para maquinários pesados, mas podem ser ideais para aplicações específicas.
Sistemas robóticos autônomos têm um futuro promissor. Esses robôs, equipados com pernas movidas por bateria, podem transformar drasticamente as operações de resgate. Imagine um robô atravessando escombros ou áreas difíceis, funcionando eficientemente sem as limitações dos motores elétricos.
O estudo é publicado aqui:
http://dx.doi.org/10.1038/s41467-024-51568-3e sua citação oficial - incluindo autores e revista - é
Thomas J. K. Buchner, Toshihiko Fukushima, Amirhossein Kazemipour, Stephan-Daniel Gravert, Manon Prairie, Pascal Romanescu, Philip Arm, Yu Zhang, Xingrui Wang, Steven L. Zhang, Johannes Walter, Christoph Keplinger, Robert K. Katzschmann. Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion. Nature Communications, 2024; 15 (1) DOI: 10.1038/s41467-024-51568-3

Compartilhar este artigo