Kunstmatige spieren laten robotbenen leven: sprong voorwaarts in robotica met elektrohydraulische HASELs
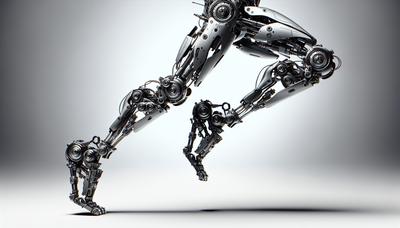
AmsterdamOnderzoekers van ETH Zürich en het Max Planck Instituut voor Intelligente Systemen hebben een nieuwe soort robotbeen ontwikkeld dat gebruikmaakt van kunstmatige spieren. In plaats van elektrische motoren, gebruiken deze benen elektro-hydraulische apparaten genaamd HASELs. Deze verandering zorgt ervoor dat de robotbenen efficiënter bewegen en zich beter aanpassen aan verschillende situaties.
Deze nieuwe ontwikkeling is van groot belang omdat het een ingrijpende verandering met zich meebrengt.
- Betere energie-efficiëntie
- Grotere aanpasbaarheid aan verschillende terreinen
- Mogelijkheid om hoog te springen en snel te bewegen
- Minder complexe sensoren nodig
Kunstmatige spieren werken door middel van statische elektriciteit. Deze apparaten bestaan uit met olie gevulde plastic zakjes met elektroden die reageren op spanningsveranderingen. Wanneer er spanning wordt toegepast, komen de elektroden dichter bij elkaar, waardoor de olie naar één kant wordt geduwd en het zakje korter wordt. Dit proces zorgt voor bewegingen die vergelijkbaar zijn met die van echte spieren.
Een voordeel van deze kunstmatige spiertechnologie is de energie-efficiëntie. Elektrische motoren zetten vaak overtollige energie om in warmte, wat koelinstallaties vereist. Dit elektrostatische systeem heeft dat probleem niet, waardoor koelsystemen zoals warmteafvoeren of ventilatoren overbodig zijn en de efficiëntie toeneemt.

Het robotbeen kan springen, wat aantoont dat het zeer flexibel en behendig is. Dit maakt het mogelijk om over oneffen terrein te lopen. Het kunstmatige spiersysteem past zich automatisch aan de omgeving aan en gebruikt slechts twee signalen om te buigen en te strekken. Er zijn weinig sensoren nodig om de positie van het been bij te houden.
Het veld van elektrohydraulische actuatoren is nog vrij nieuw en bestaat pas zo'n zes jaar. Snelle vooruitgang in besturingstechnieken en machine learning onderstreept de behoefte aan nieuwe hardware. Kunstmatige spieren lijken veelbelovend voor speciale toepassingen zoals grijpers die hun bewegingen moeten aanpassen aan het object. Deze actuatoren zijn echter nog niet geschikt voor zwaar materieel, maar zouden goed kunnen werken voor specifieke toepassingen.
Robotsystemen die zelfstandig werken, kunnen een veelbelovende toekomst tegemoet zien. Deze robots, aangedreven door batterijen, zouden reddingsmissies aanzienlijk kunnen transformeren. Stel je een robot voor die zich door puin of ruwe terreinen beweegt en optimaal functioneert zonder de beperkingen van elektrische motoren.
De studie is hier gepubliceerd:
http://dx.doi.org/10.1038/s41467-024-51568-3en de officiële citatie - inclusief auteurs en tijdschrift - is
Thomas J. K. Buchner, Toshihiko Fukushima, Amirhossein Kazemipour, Stephan-Daniel Gravert, Manon Prairie, Pascal Romanescu, Philip Arm, Yu Zhang, Xingrui Wang, Steven L. Zhang, Johannes Walter, Christoph Keplinger, Robert K. Katzschmann. Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion. Nature Communications, 2024; 15 (1) DOI: 10.1038/s41467-024-51568-3

Deel dit artikel