Músculos artificiales revolucionan piernas robóticas: un salto adelante en la robótica
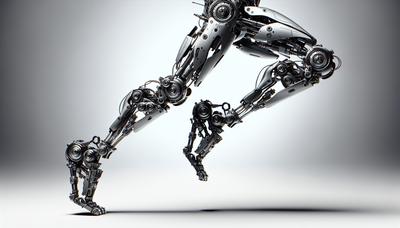
MadridInvestigadores de ETH Zurich y del Instituto Max Planck de Sistemas Inteligentes han desarrollado una nueva clase de pierna robótica que utiliza músculos artificiales. En lugar de usar motores eléctricos como la mayoría de los robots, estas piernas emplean dispositivos electrohidráulicos llamados HASELs. Este cambio permite que las piernas robóticas se muevan de manera más eficiente y se adapten mejor a diferentes situaciones.
Este nuevo avance es importante porque implica una transformación fundamental.
Mayor eficiencia energética, mejor adaptabilidad a diversos terrenos, capacidad para realizar saltos altos y movimientos rápidos, y uso reducido de sensores complejos.
Los músculos artificiales funcionan mediante electricidad estática. Estos dispositivos son bolsas de plástico llenas de aceite con electrodos que reaccionan a los cambios de voltaje. Al aplicar voltaje, los electrodos se acercan empujando el aceite hacia un lado, acortando la bolsa. Este proceso genera movimientos parecidos a los de los músculos reales.

Una ventaja sobre los motores eléctricos es su eficiencia energética. Los motores eléctricos a menudo convierten la energía extra en calor, lo que requiere sistemas de enfriamiento para gestionarlo. Este sistema de músculos artificiales, al ser electrostático, no presenta este problema. Por lo tanto, no necesita disipadores de calor o ventiladores, lo que lo hace más eficiente.
La pierna robótica puede saltar, demostrando su gran capacidad de adaptación y agilidad. Esto le permite caminar en terrenos irregulares. El sistema de músculos artificiales se ajusta automáticamente al entorno, utilizando solo dos señales para doblarse y extenderse. No necesita muchos sensores para monitorear la posición de la pierna.
El campo de los actuadores electrohidráulicos es aún nuevo, habiendo comenzado hace unos seis años. Los rápidos avances en controles y aprendizaje automático muestran la necesidad de nuevo hardware. Músculos artificiales parecen prometedores para usos especiales como pinzas que deben ajustar sus movimientos según el objeto. Sin embargo, estos actuadores aún no son útiles para maquinaria pesada, pero podrían ser buenos para aplicaciones específicas.
Sistemas robóticos autónomos podrían tener un futuro prometedor. Estos robots, con patas impulsadas por baterías, podrían transformar radicalmente las misiones de rescate. Imagina un robot moviéndose entre escombros o terrenos difíciles, funcionando eficientemente sin las limitaciones de motores eléctricos.
El estudio se publica aquí:
http://dx.doi.org/10.1038/s41467-024-51568-3y su cita oficial - incluidos autores y revista - es
Thomas J. K. Buchner, Toshihiko Fukushima, Amirhossein Kazemipour, Stephan-Daniel Gravert, Manon Prairie, Pascal Romanescu, Philip Arm, Yu Zhang, Xingrui Wang, Steven L. Zhang, Johannes Walter, Christoph Keplinger, Robert K. Katzschmann. Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion. Nature Communications, 2024; 15 (1) DOI: 10.1038/s41467-024-51568-3

Compartir este artículo