Sztuczne mięśnie pozwalają robotycznym nogom poruszać się swobodnie: przełom w robotyce.
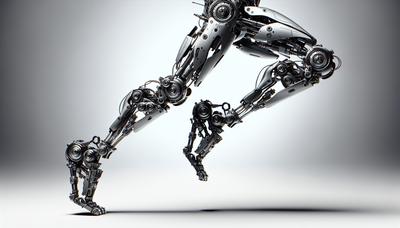
WarsawNaukowcy z ETH Zurich oraz Instytutu Maxa Plancka dla Systemów Inteligentnych stworzyli nowy typ nóg robotycznych wykorzystujących sztuczne mięśnie. Zamiast elektrycznych silników, które są typowe dla większości robotów, te nogi używają elektrohydraulicznych urządzeń zwanych HASEL. Dzięki temu rozwiązaniu nogi robotyczne poruszają się wydajniej i lepiej dostosowują się do różnych sytuacji.
Ta nowa zmiana jest istotna, ponieważ wprowadza znaczne przekształcenie.
- Zwiększona efektywność energetyczna
- Lepsza zdolność adaptacji do różnych terenów
- Możliwość wykonywania wysokich skoków i szybkich ruchów
- Mniej skomplikowanych czujników potrzebnych
Sztuczne mięśnie działają na zasadzie elektryczności statycznej. Urządzenia te to plastikowe worki wypełnione olejem, wyposażone w elektrody, które reagują na zmiany napięcia. Gdy przyłożone jest napięcie, elektrody zbliżają się do siebie, wypychając olej na bok i skracając worek. Proces ten powoduje ruchy podobne do tych wykonywanych przez prawdziwe mięśnie.
Jedną z zalet w porównaniu z silnikami elektrycznymi jest ich efektywność energetyczna. Silniki elektryczne często zamieniają nadmiar energii w ciepło, co wymaga zastosowania systemów chłodzenia. Ten system sztucznych mięśni, ponieważ jest elektrostatyczny, nie ma tego problemu. Dzięki temu nie potrzebuje radiatorów ani wentylatorów, co czyni go bardziej wydajnym.

Sztuczna noga potrafi skakać, co świadczy o jej dużej elastyczności i zwinności. Dzięki temu radzi sobie na nierównym terenie. System sztucznych mięśni dostosowuje się automatycznie do otoczenia, wykorzystując zaledwie dwa sygnały do zginania i prostowania. Nie potrzebuje wielu czujników, aby śledzić pozycję nogi.
Pole elektro-hydraulicznych siłowników jest nadal stosunkowo młode, istniejąc od około sześciu lat. Szybkie postępy w zakresie sterowania i uczenia maszynowego wskazują na zapotrzebowanie na nowy sprzęt. Sztuczne mięśnie wydają się obiecujące dla specjalnych zastosowań, takich jak chwytaki, które muszą dostosowywać swoje ruchy w zależności od chwytanego obiektu. Jednak obecnie te siłowniki nie są jeszcze odpowiednie do ciężkich maszyn, ale mogą się sprawdzić w określonych aplikacjach.
Systemy robotyczne, które działają samodzielnie, mogą mieć obiecującą przyszłość. Wyposażone w nogi zasilane bateriami, te roboty mogą znacząco zmienić misje ratunkowe. Wyobraź sobie robota poruszającego się przez gruz czy trudny teren, skutecznego bez ograniczeń jakie niesie stosowanie tradycyjnych silników elektrycznych.
Badanie jest publikowane tutaj:
http://dx.doi.org/10.1038/s41467-024-51568-3i jego oficjalne cytowanie - w tym autorzy i czasopismo - to
Thomas J. K. Buchner, Toshihiko Fukushima, Amirhossein Kazemipour, Stephan-Daniel Gravert, Manon Prairie, Pascal Romanescu, Philip Arm, Yu Zhang, Xingrui Wang, Steven L. Zhang, Johannes Walter, Christoph Keplinger, Robert K. Katzschmann. Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion. Nature Communications, 2024; 15 (1) DOI: 10.1038/s41467-024-51568-3

Udostępnij ten artykuł