Muscoli artificiali rivoluzionano le gambe robotiche: un salto avanti nella robotica
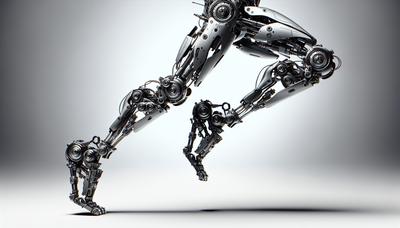
RomeRicercatori dell'ETH Zurich e del Max Planck Institute for Intelligent Systems hanno sviluppato un nuovo tipo di gamba robotica che utilizza muscoli artificiali. Invece di usare motori elettrici come la maggior parte dei robot, queste gambe impiegano dispositivi elettro-idraulici chiamati HASELs. Questo cambiamento permette alle gambe robotiche di muoversi in modo più efficiente e di adattarsi meglio a diverse situazioni.
Questo nuovo sviluppo è rilevante poiché apporta un cambiamento significativo.
- Maggiore efficienza energetica
- Migliore adattabilità ai diversi terreni
- Capacità di eseguire salti alti e veloci movimenti
- Necessità ridotta di sensori complessi
I muscoli artificiali funzionano grazie all'elettricità statica. Questi dispositivi sono sacche di plastica riempite di olio con elettrodi che reagiscono ai cambiamenti di tensione. Quando viene applicata una tensione, gli elettrodi si avvicinano, spingendo l'olio da un lato e accorciando la sacca. Questo processo genera movimenti simili a quelli dei muscoli naturali.
Un vantaggio rispetto ai motori elettrici è l'efficienza energetica. I motori elettrici spesso trasformano l'energia in eccesso in calore, richiedendo sistemi di raffreddamento per gestirlo. Questo sistema di muscoli artificiali, essendo elettrostatico, non presenta questo problema. Di conseguenza, non necessita di dissipatori di calore o ventole, risultando più efficiente.

La gamba robotica può saltare, dimostrando grande adattabilità e agilità. Questo le consente di camminare su terreni irregolari. Il sistema muscolare artificiale si adatta automaticamente all'ambiente circostante, utilizzando solo due segnali per piegarsi ed estendersi. Non ha bisogno di molti sensori per monitorare la posizione della gamba.
Il campo degli attuatori elettroidraulici è ancora giovane, essendo iniziato circa sei anni fa. I rapidi progressi nei controlli e nell'apprendimento automatico mostrano la necessità di nuovo hardware. I muscoli artificiali sembrano promettenti per usi speciali, come pinze che devono adattare i movimenti in base all'oggetto. Tuttavia, questi attuatori non sono ancora adatti per macchinari pesanti, ma potrebbero essere utili per applicazioni specifiche.
Sistemi robotici autonomi potrebbero avere un futuro promettente. Questi robot, equipaggiati con zampe alimentate a batteria, potrebbero rivoluzionare le missioni di salvataggio. Immagina un robot che si muove agilmente tra macerie o terreni accidentati, operando efficacemente senza le limitazioni dei motori elettrici.
Lo studio è pubblicato qui:
http://dx.doi.org/10.1038/s41467-024-51568-3e la sua citazione ufficiale - inclusi autori e rivista - è
Thomas J. K. Buchner, Toshihiko Fukushima, Amirhossein Kazemipour, Stephan-Daniel Gravert, Manon Prairie, Pascal Romanescu, Philip Arm, Yu Zhang, Xingrui Wang, Steven L. Zhang, Johannes Walter, Christoph Keplinger, Robert K. Katzschmann. Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion. Nature Communications, 2024; 15 (1) DOI: 10.1038/s41467-024-51568-3

Condividi questo articolo