人工筋肉がロボットの脚に生命を吹き込む:ロボティクスの大きな飛躍
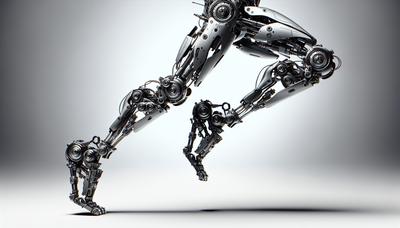
Tokyoチューリッヒ工科大学とマックスプランク知能システム研究所の研究者たちは、新しいタイプのロボット脚を開発しました。この脚は人工筋肉を使用しており、ほとんどのロボットが採用している電動モーターの代わりに、エレクトロ・ハイドロデバイスであるHASELを利用しています。この変更により、ロボット脚はより効率的に動き、様々な状況に適応しやすくなっています。
この新しい展開は重要です。それは大きな変化をもたらすからです。
- より高いエネルギー効率
- 様々な地形への適応力強化
- 高いジャンプや素早い動きが可能
- 複雑なセンサーが少なくて済む
人工筋肉は静電気を利用して動作します。これらの装置はオイルが入ったプラスチック製の袋で構成されており、電圧の変化に応じて電極が反応します。電圧が加わると電極が互いに近づき、オイルが片側に押しやられ、袋が短くなります。このプロセスは、実際の筋肉の動きに似た動作を引き起こします。
電動モーターの利点の一つは、そのエネルギー効率です。電動モーターは余分なエネルギーを熱に変えることがあり、冷却システムが必要となります。この人工筋肉システムは静電性であるため、この問題を抱えていません。そのため、ヒートシンクやファンを必要とせず、より効率的です。

ロボットの脚は跳ねることができ、高い適応性と敏捷性を示しています。これにより、不均一な地面でも歩行が可能となります。人工筋肉システムは、周囲の変化に応じて自動的に調整され、2つの信号だけで屈伸を行います。脚の位置を把握するために多くのセンサーを必要としません。
電気油圧アクチュエータの分野はまだ新しく、約6年前に始まりました。制御技術や機械学習の急速な進歩により、新しいハードウェアの必要性が示されています。人工筋肉は、特に物体に応じて動きを変える必要があるグリッパーなどの特殊な用途に有望です。しかし、これらのアクチュエータはまだ重機には適していませんが、特定の用途には適している可能性があります。
自律的に作業するロボットシステムは明るい未来を持つ可能性があります。これらのロボットはバッテリーで駆動する足を使って、救助ミッションに大きな変化をもたらすかもしれません。電動モーターの制約を受けずに、がれきや険しい地形でも巧みに動くロボットを想像してみてください。
この研究はこちらに掲載されています:
http://dx.doi.org/10.1038/s41467-024-51568-3およびその公式引用 - 著者およびジャーナルを含む - は
Thomas J. K. Buchner, Toshihiko Fukushima, Amirhossein Kazemipour, Stephan-Daniel Gravert, Manon Prairie, Pascal Romanescu, Philip Arm, Yu Zhang, Xingrui Wang, Steven L. Zhang, Johannes Walter, Christoph Keplinger, Robert K. Katzschmann. Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion. Nature Communications, 2024; 15 (1) DOI: 10.1038/s41467-024-51568-3
昨日 · 14:48
新技術で初めて銀河外星の姿を詳細に捉えた画期的研究
昨日 · 12:35
HIV潜伏を解除するアフリカ薬草:クロトン・オリガンドルスの革新的研究

昨日 · 10:24
食物繊維を美味しくする革新技術: 快適に楽しむ食事体験の実現
この記事を共有