アリに着想を得た技術でロボットのナビゲーションが革命的に効率化する新研究

Tokyoデルフト工科大学(TU Delft)の研究者たちは、小型ロボットがナビゲーションする新しい方法を開発しました。これはアリの行動にヒントを得たものです。これらのロボットは視覚的な手がかりを利用し、自分の歩数を記録します。これはアリが道を見つける方法と似ています。この新たな手法は、小型ロボットが持つ限られた処理能力とバッテリー寿命にとって重要です。この研究は2024年7月17日に『サイエンス・ロボティクス』誌で発表されました。
これが重要な理由です。
- 計算とメモリの必要量を最小限に抑えます。
- 小型ロボットが外部インフラなしで自主的にナビゲートできるようにします。
- 産業検査や農業などでの応用が期待されます。
数十グラムから数百グラムの重さの小型ロボットは、安全性が高く、効率的です。狭い空間を移動でき、人にぶつかっても危険性が少ないです。しかし、その小ささ故に、大型ロボットのような重く電力を多く消費するセンサーを搭載することができません。一般的なナビゲーションツールであるGPSやLiDARは、しばしばサイズが大き過ぎたり、これらの小型ロボットには不向きです。
TU Delftのチームは、自然界を研究して解決策を見つけました。アリは、独自の動き感知であるオドメトリーと単純な視覚記憶を用いて効率的に移動します。この方法は処理能力をほとんど必要としないため、小型ロボットに最適です。生物学者たちは、アリが周囲の素早いイメージを撮影することを発見しました。家に帰る際、アリは現在の眺めをこれらのイメージと比較して帰り道を見つけます。
研究者たちは「CrazyFlie」という56グラムのドローンでこのモデルをテストしました。このドローンは基本的なカメラとマイクロコントローラーと呼ばれる小さなコンピューターを使って航行します。複雑なシステムとは異なり、ドローンは100メートル進むごとに0.65キロバイトのデータしか使いません。設定された距離ごとに写真を撮影し、オドメトリと呼ばれるプロセスを使ってこれらの地点間を移動します。この方法により、このドローンは非常に少ない電力とコンピューティングリソースでより遠くまで移動できます。

研究の主執筆者であるトム・ファン・ダイク博士によれば、このロボットは異なる位置間を効果的に移動することができるとのことです。ポイントは、メモリの節約のためにこれらの位置を十分に離して配置しつつ、ロボットがスムーズに動けるように近接させることです。
共著者のGuido de Croon教授は、この方法は詳細な3Dマップを作成するものではないと説明しました。その代わりに、ロボットが出発地点に戻ることを可能にします。これは倉庫での在庫確認や温室での作物点検といった作業には十分です。ドローンはデータを収集して戻り、それをアップロードすることができるため、高度な処理を必要とせずに作業を簡単にします。
小型ロボットには多くの用途があります。農場では、害虫や病気を早期に発見するために多数のロボットを使用することができます。また、倉庫での在庫チェックや工場でのガス漏れの検知にも役立ちます。彼らは小さいため、屋内を手軽に移動でき、特に問題を引き起こすことはありません。
この新しいロボットのナビゲーション方法は、小型の自律型ロボットが実際の状況で効果的に機能するために重要です。また、少量の計算能力とメモリを使用するため、多くの用途において便利で手頃な選択肢となります。
この研究はこちらに掲載されています:
http://dx.doi.org/10.1126/scirobotics.adk0310およびその公式引用 - 著者およびジャーナルを含む - は
Tom van Dijk, Christophe De Wagter, Guido C. H. E. de Croon. Visual route following for tiny autonomous robots. Science Robotics, 2024; 9 (92) DOI: 10.1126/scirobotics.adk0310
今日 · 6:45
革新的なツールで脊髄損傷回復における地域経済への影響を解明
昨日 · 22:39
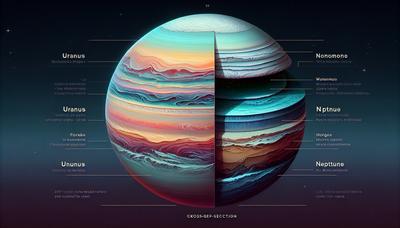
ウラヌスとネプチューンの内部構造の新発見! 磁場の謎を解き明かす

昨日 · 20:34
DNAの植物への影響、TNTよりも深刻—環境と農業を脅かす可能性
この記事を共有